Projects
A selection of my work across robotics, soft actuation, rapid prototyping, and human-centered design.
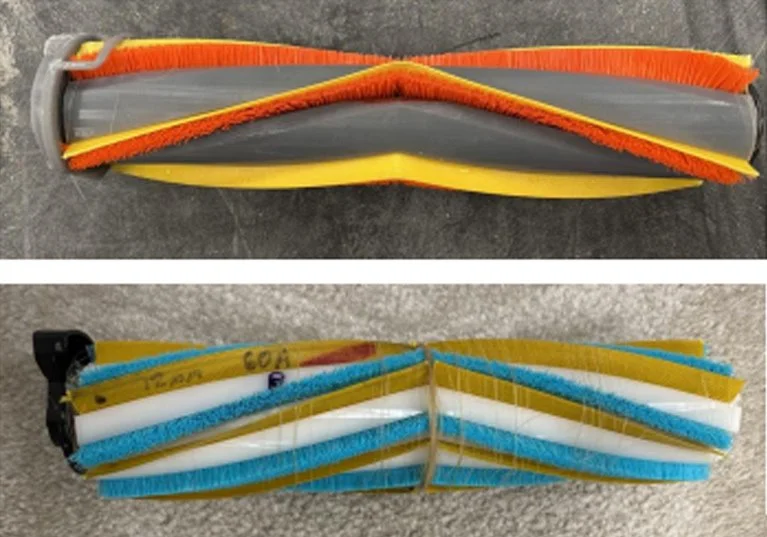
Brushroll DOE
Designed and iterated brushrolls for the Shark CarpetXpert HairPro, using testing and rapid prototyping to eliminate hair wrap while maintaining cleaning performance.

CatBot
Led mechanical systems development for a student-designed quadruped using soft McKibben actuators and compliant leg mechanisms to achieve bio-inspired locomotion.
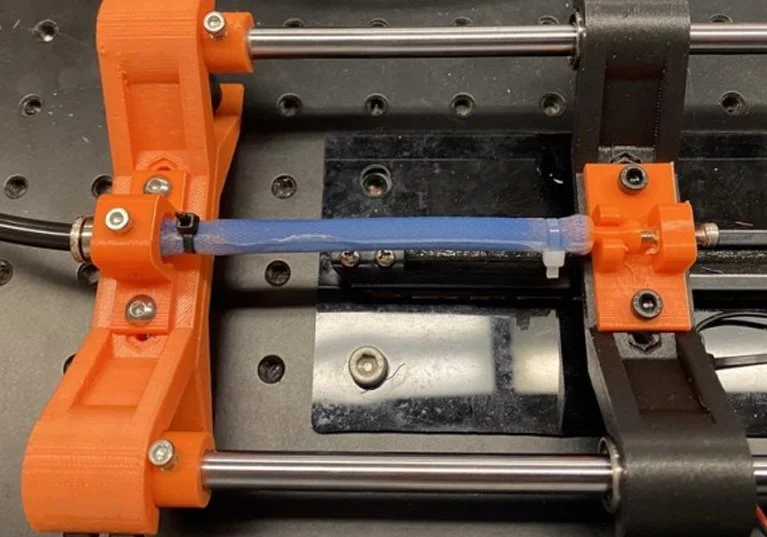
Soft Actuator Research for Compliant Grippers
Investigated multiple soft actuator technologies, built prototypes, and designed tests to compare force density, controllability, and integration potential in gripper systems.

3D Printed Soft Pneumatic Actuators
Designed and fabricated novel pneumatic soft actuators using multimaterial FFF printing, focusing on manufacturability, airtightness, and compliant geometry.
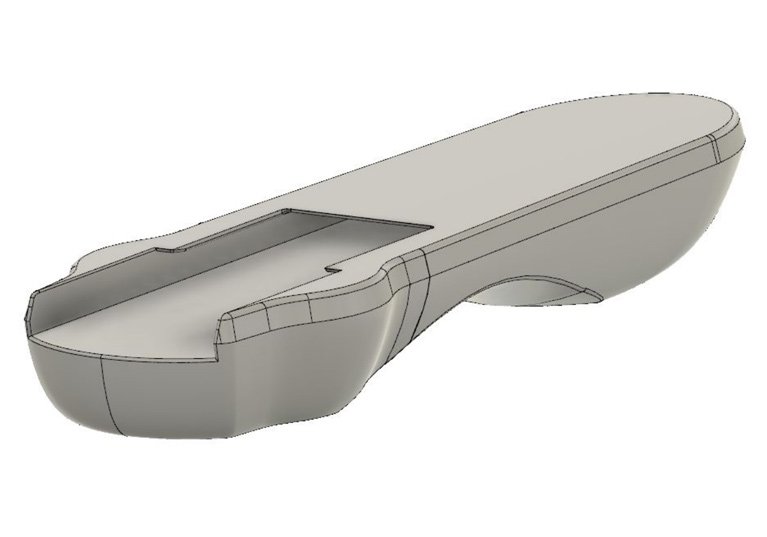
Adaptive TV Remote Case
Created an ergonomic remote case for users with reduced dexterity, improving grip stability and comfort through iterative prototyping and human-centered design.
Contact
Working on something interesting? I’d love to hear about it—let’s see what we can build together.