Build It. Break It. Build It Better.
About Me
I’m a mechanical engineer who loves building, breaking, and refining real hardware—especially in robotics and soft actuation. My resume reflects the work I’ve done across research and industry, where I focus on turning ideas into physical systems through hands-on design, prototyping, and iteration.
Featured Projects

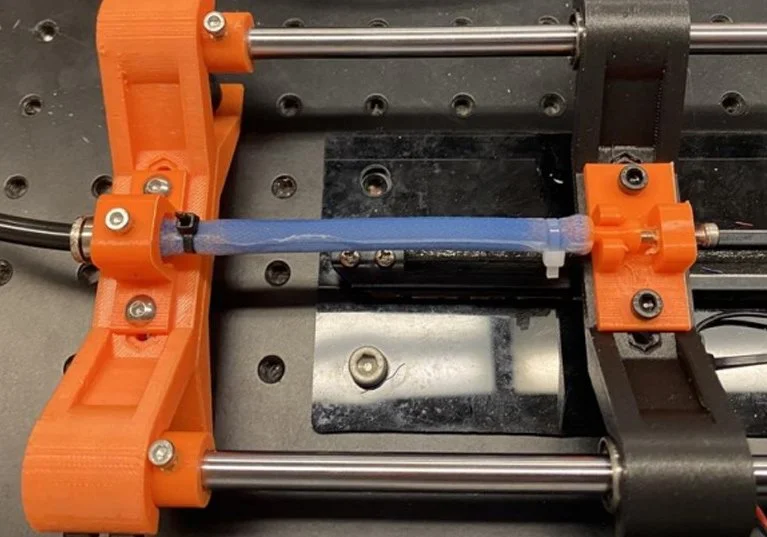
3D Printed Soft Pneumatic Actuators
Designed and fabricated novel pneumatic soft actuators using multimaterial FFF 3D printing for integrated manufacturing. This work addresses key challenges in braid resolution, airtightness, and process complexity, and was accepted for presentation at IEEE RoboSoft 2026.

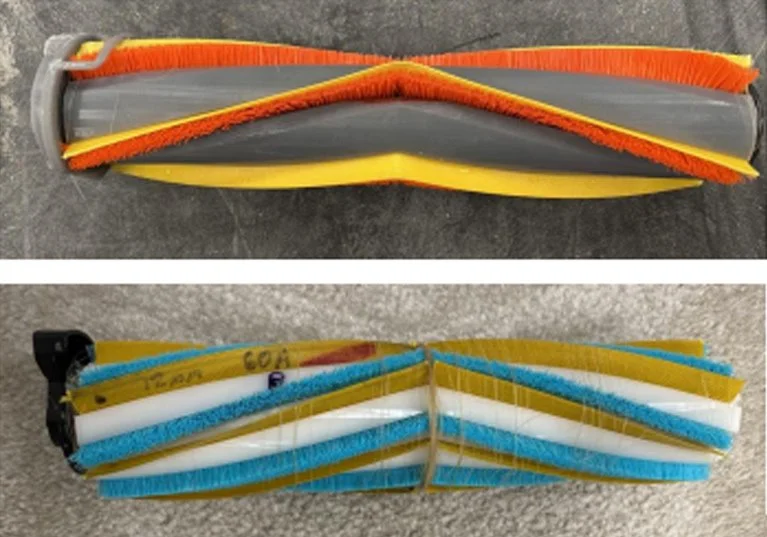
Brushroll DOE – SharkNinja Mechanical Engineering Co-op
Designed and iterated brushrolls for the second-generation Shark CarpetXpert HairPro, achieving zero hair wrap and eliminating pet hair buildup while maintaining cleaning performance. Focused on refining geometry to balance agitation and hair migration within real manufacturing constraints.
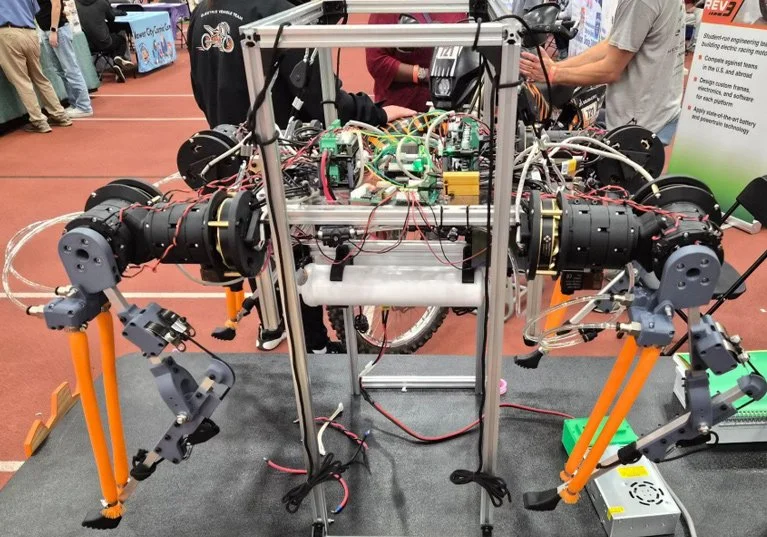
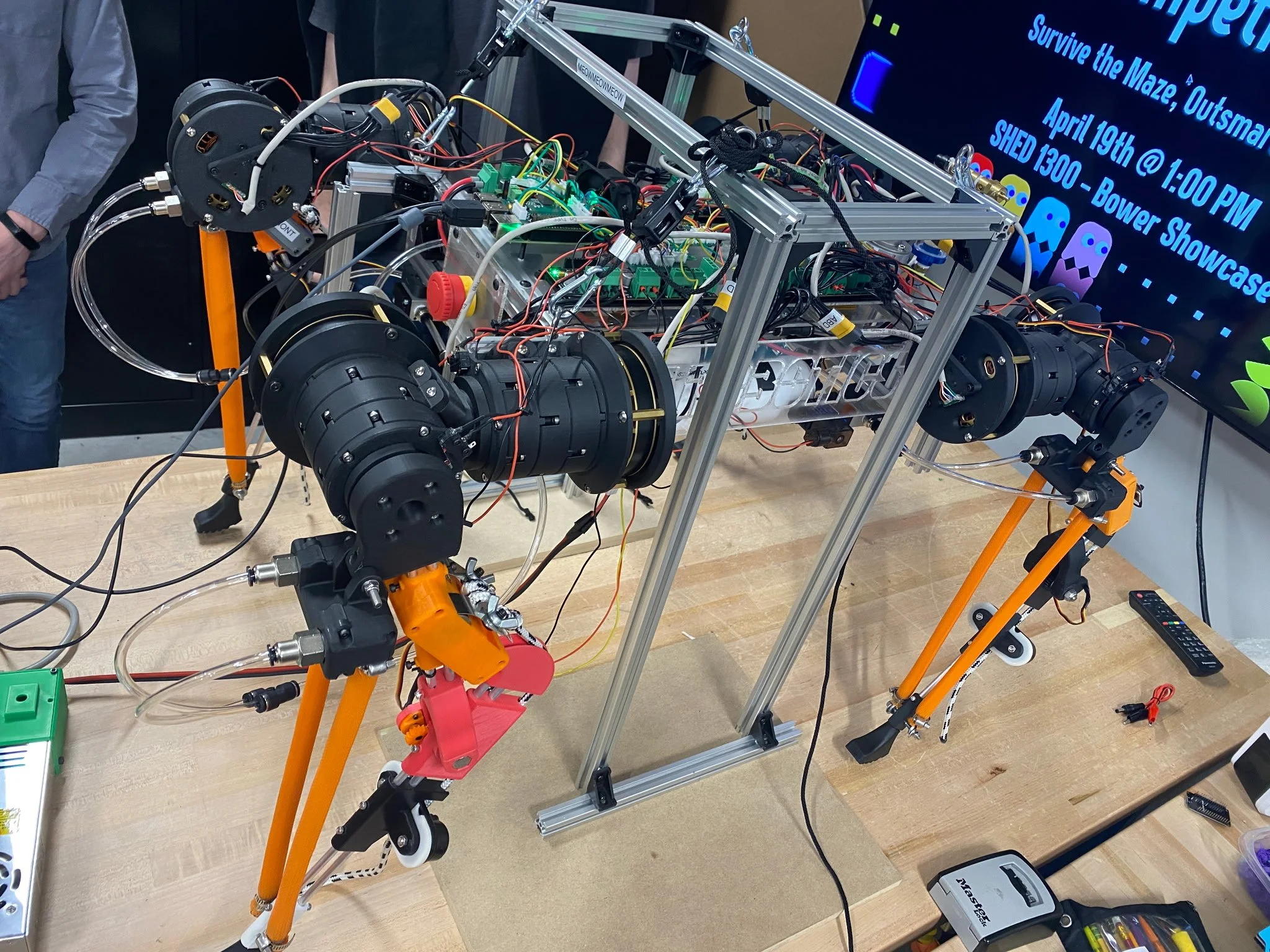
CatBot – Mechanical Systems Team Lead
CatBot is an RIT student-designed quadruped that uses soft McKibben actuators and compliant leg mechanisms to achieve bio-inspired locomotion. As Mechanical Systems Team Lead since 2023, I’ve focused on balancing actuator force and leg compliance to enable stable, reliable gait.

Soft Actuator Research for Compliant Grippers
Investigated a range of soft actuator technologies for use in compliant gripper systems, building prototypes and designing tests for rapid validation. Evaluated each approach based on force density, controllability, and integration feasibility.
Contact
Working on something interesting? I’d love to hear about it—let’s see what we can build together.