Soft Actuator Research for Compliant Grippers
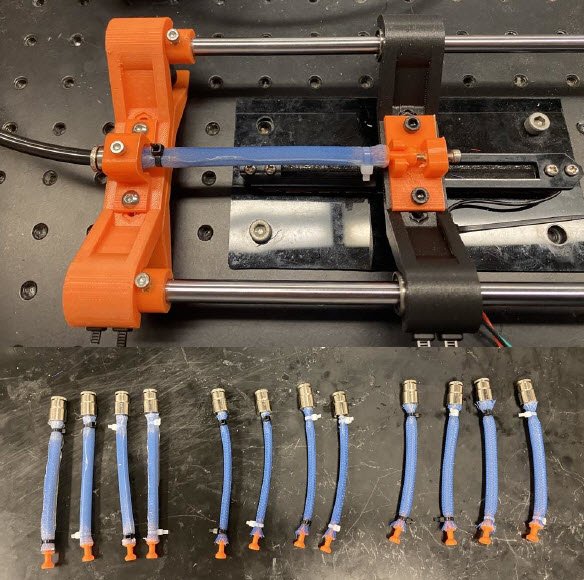
Thin McKibbben Muscle Fabrication & Testing
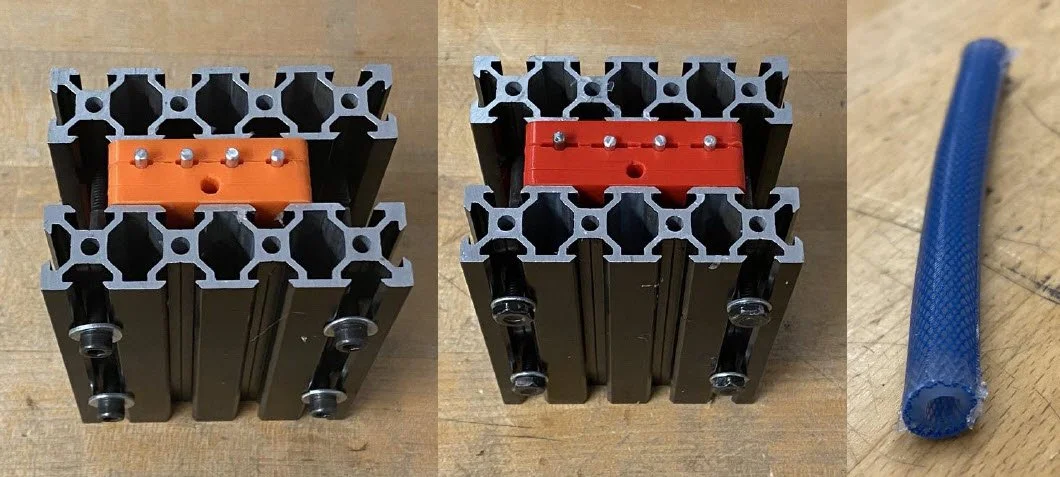
Fabrication of Novel Thin McKibben Muscle with Embedded Braid via Overmolding
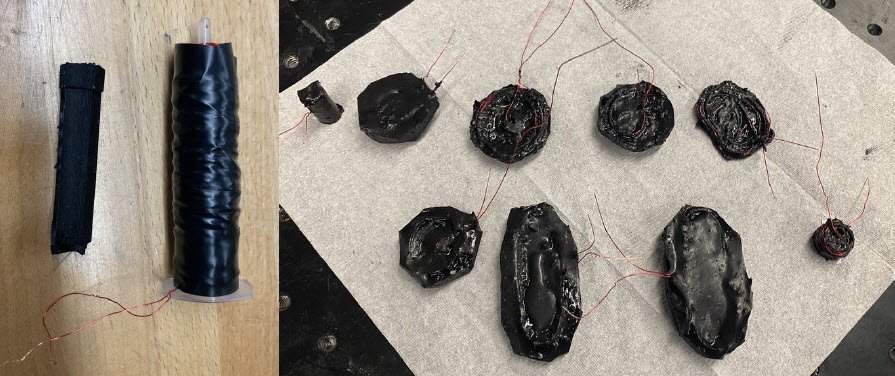
Soft Electromagnet Exploration

Twisted & Coiled Actuator Prototyping
Investigated various soft actuator technologies for potential implementation in a compliant gripper mechanism. Fabricated prototypes and designed tests for rapid actuator validation. Evaluated multiple actuation strategies based on force density, controllability, and feasibility for integration into a compliant gripper.
Key Skills
Review & synthesis of previous research
Rapid prototyping
Testing & iteration (“fail fast”)
Design of experiments
Client
Rochester Institute of Technology
Year
2024 - 2025
Contact
Working on something interesting? I’d love to hear about it—let’s see what we can build together.