CatBot – Mechanical Systems
Team Lead
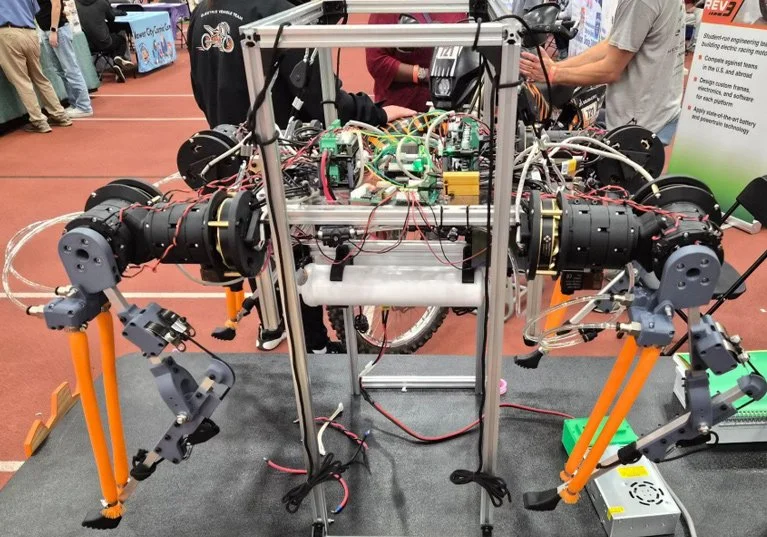
CatBot is an RIT student-designed quadruped that uses soft McKibben actuators and compliant leg mechanisms to achieve bio-inspired locomotion. Leg compliance and actuator force are carefully balanced to achieve stable gait without structural overload. Mechanical systems team lead since 2023.
Key Skills
Compliant mechanism design
Mechanical system design
Task ownership & delegation
Client
Rochester Institute of Technology
Year
2021 - 2026

Contact
Working on something interesting? I’d love to hear about it—let’s see what we can build together.